
Model-Based Development
for Motor Drive Systems
From Virtual Simulation to Physical Validation — The Complete Digital Twin Approach
The Challenge in Modern Motor Drive Development
Engineers and companies today face unprecedented complexity in developing electric motor control systems for automotive, industrial automation, robotics, and renewable energy applications.
⚠️ Traditional Approach Problems
- Long Development Cycles: 18-24 months from concept to validated product
- Late-Stage Hardware Issues: Control instabilities discovered only during physical testing
- Costly Iterations: Each hardware revision costs €50k-€200k in prototype and testing time
- Limited Testing Scenarios: Physical prototypes can’t simulate all fault conditions safely
- Knowledge Silos: Disconnected teams working with incompatible simulation and test data
✅ MBD Testbench Solution
- Accelerated Development: 40-60% reduction in time-to-market through parallel virtual and physical testing
- Early Validation: Catch control design flaws in simulation before hardware exists
- Cost-Effective Iteration: Test hundreds of scenarios in software at near-zero marginal cost
- Complete Test Coverage: Simulate fault injection, edge cases, and dangerous operating conditions safely
- Unified Workflow: Seamless transition from Simulink model → C code → Hardware-in-the-Loop → Physical testbench
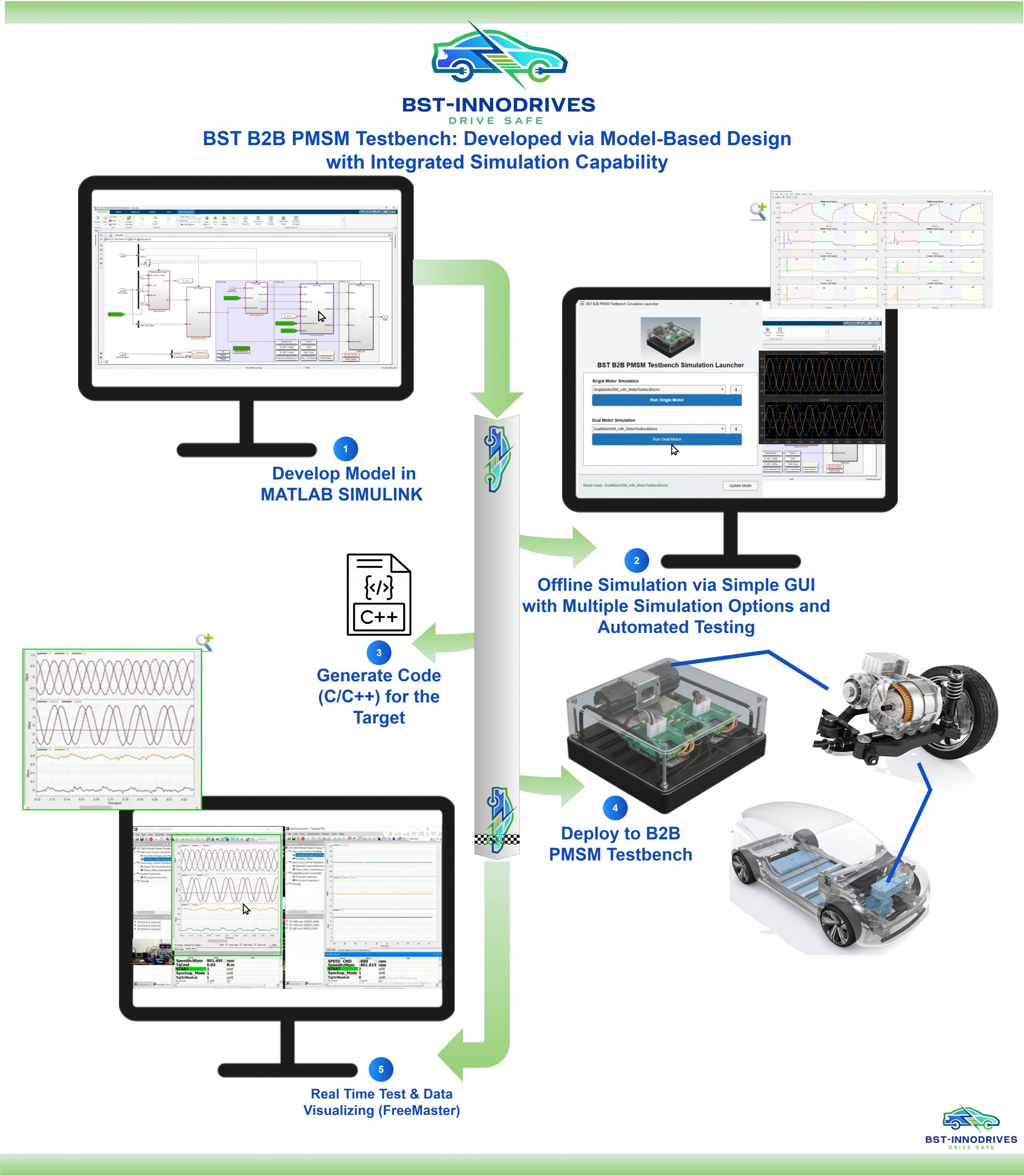
Digital Twin Architecture
Inspired by Siemens Digital Twin Methodology — Virtual and Physical Systems Working in Perfect Synchronization
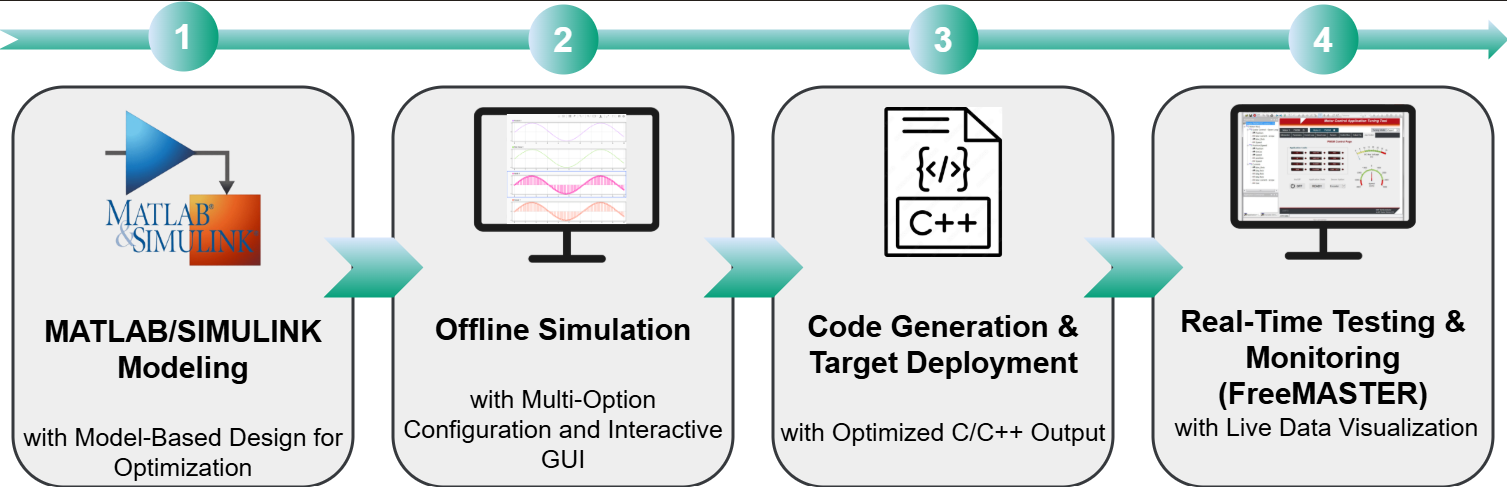
1
Virtual Model Development
MATLAB/Simulink Plant Model
- Complete PMSM electrical dynamics (dq-axis modeling)
- Mechanical load simulation (inertia, friction, torque disturbances)
- Inverter non-idealities (dead-time, voltage drop, switching delays)
- Sensor imperfections (noise, quantization, offset drift)
→ Develop Field-Oriented Control (FOC), Direct Torque Control (DTC), sensorless observers
2
Offline Simulation (SIL)
Software-in-the-Loop Testing
- Run 10,000+ scenarios overnight (speed profiles, load transients, faults)
- Automated parameter sweeps for PI/PID tuning
- Monte Carlo analysis for robustness verification
- Failure mode injection (open-circuit, short-circuit, sensor failures)
→ Identify 80% of control issues before any hardware exists
3
Embedded Code Generation
Automatic C/C++ Deployment
- Simulink Embedded Coder → Production-ready C code
- Fixed-point optimization for MCU constraints
- AUTOSAR-compliant software architecture (optional)
- MISRA C compliance for safety-critical applications
→ Eliminate manual coding errors, ensure model-code traceability
4
Hardware-in-the-Loop (HIL)
Real MCU + Virtual Plant
- NXP MPC5744P runs actual embedded code (10 kHz PWM, real ADC timing)
- Simulink plant model executes on real-time target (e.g., dSPACE, Speedgoat)
- Closed-loop testing with microsecond-accurate timing
- Validate MCU-specific issues (interrupt latency, DMA conflicts, stack overflow)
→ De-risk embedded software before touching the physical motor
5
Physical Testbench (B2B PMSM)
Final Real-World Validation
- Back-to-back mechanical coupling → Energy regeneration (one motor drives, one loads)
- Live data monitoring via NXP FreeMASTER (torque, speed, currents, temperatures)
- Efficiency mapping, thermal stress testing, acoustic noise measurement
- Correlation analysis: Compare real behavior vs. simulation predictions
→ Close the loop: Feed real-world data back to refine virtual models
6
Continuous Model Refinement
Living Digital Twin
- System identification: Update Simulink parameters from measured data
- Discrepancy analysis tools (automated reporting of model vs. hardware gaps)
- Version-controlled model repository (Git integration for collaborative development)
- Continuous integration/testing pipeline for regression prevention
→ Achieve <5% error between simulated and measured performance
Who Needs an MBD Testbench?
Real-world applications across industries and engineering disciplines
🚗 Automotive OEMs & Tier-1 Suppliers
Application: Electric Vehicle Traction Inverters
- Develop regenerative braking strategies for maximum energy recovery
- Optimize torque vectoring algorithms for AWD systems
- Test ISO 26262 ASIL-D safety mechanisms (safe torque off, safe operating area monitoring)
- Validate 800V SiC inverter switching strategies to minimize EMI
- Simulate WLTP drive cycles to verify efficiency targets before dyno testing
Typical Team: Control Engineers, Functional Safety Managers, Calibration Engineers
🏭 Industrial Automation Companies
Application: Servo Drives for CNC Machines, Robots
- Tune high-bandwidth current loops for sub-millisecond torque response
- Implement anti-resonance filters for mechanical compliance suppression
- Test coordinated multi-axis motion profiles (e.g., 6-axis robot trajectory tracking)
- Validate EtherCAT / PROFINET real-time communication stacks under load
- Benchmark settling time and overshoot against competitor products
Typical Team: Motion Control Engineers, PLC Programmers, Systems Integration Specialists
🌍 Renewable Energy Developers
Application: Wind Turbine Generator Converters
- Design MPPT (Maximum Power Point Tracking) algorithms for variable wind conditions
- Test low-voltage ride-through (LVRT) compliance per grid codes (e.g., IEEE 1547)
- Simulate reactive power injection for grid stabilization
- Validate gearbox resonance damping controllers
- Prototype offshore platform pitch control coordination with generator torque
Typical Team: Power Electronics Engineers, Grid Integration Specialists, Control System Designers
🎓 Universities & Research Institutes
Application: Advanced Control Algorithm Research
- Teach Model Predictive Control (MPC) for motor drives with real-time constraints
- Research sensorless control techniques (Extended Kalman Filters, Sliding Mode Observers)
- Experiment with advanced modulation schemes (SVPWM, discontinuous PWM, random PWM)
- Publish academic papers with reproducible experimental results
- Train master’s/PhD students in industry-standard tools (MATLAB/Simulink, C2000/NXP MCUs)
Typical Users: PhD Students, Postdocs, Lab Instructors, Academic Principal Investigators
✈️ Aerospace & Defense
Application: Electromechanical Actuator (EMA) Control
- Develop fault-tolerant motor drives for flight control surfaces
- Test redundant control channel arbitration logic
- Validate DO-178C software compliance through model-based traceability
- Simulate jamming scenarios (mechanical lock-up, electrical faults) and recovery procedures
- Certify EMI/EMC performance under MIL-STD-461 requirements
Typical Team: Avionics Engineers, Safety Certification Specialists, Flight Test Engineers
🚀 Startups & Innovation Labs
Application: Rapid Prototyping for Novel Concepts
- Accelerate product-market fit iterations without expensive custom hardware
- Demonstrate control algorithms to investors using live testbench demos
- Validate technical feasibility before committing to PCB fabrication
- Explore unconventional motor types (axial flux, switched reluctance) with reconfigurable testbench
- Build IP portfolio through rapid experimentation and patent filings
Typical Team: Founders, Embedded Software Developers, Hardware Prototyping Engineers
Scalability Pathway
From €5k Educational Kits to €500k Industrial Test Cells — Your Platform Grows with Your Needs
| Platform Tier | Target User | Power Rating | Voltage Range | Typical Cost | Key Features |
|---|---|---|---|---|---|
| 🎓 EduLab Explorer | Universities, Training Centers | 60W (12V × 5A) | 12V DC | €4,500 – €7,000 | Portable, dual PMSM modules, student manuals, Simulink templates, basic regen braking |
| 🔬 DevLab Research | R&D Labs, Startups | 2-5 kW | 48-400V DC | €18,000 – €35,000 | Tunable motors, 70% model access, HIL support, advanced EV features, automated testing |
| 🏭 ProVerif Integration | OEMs, Tier-1 Suppliers | 10-50 kW | 400-800V DC | €60,000 – €150,000 | 100% model access, AUTOSAR stack, CI/CD pipeline, SIL compliance tools, production code |
| ⚡ IndustrialCell Custom | Powertrain Test Centers | 100-500 kW | Up to 1000V DC/AC | €200,000 – €500,000+ | Multi-motor configurations, liquid cooling, dyno integration, automated test sequences, SCADA |
Migration Path Example: Automotive Startup → Tier-1 Supplier
Year 0-1
Concept Phase
Start with DevLab (€25k). Build FOC algorithm in Simulink, validate regenerative braking concept through SIL.
Year 1-2
Prototype Phase
Upgrade to ProVerif (€80k). Add AUTOSAR software stack, run ISO 26262 ASIL-B compliance checks, freeze design for beta customers.
Year 2-3
Pre-Production
Commission custom IndustrialCell (€250k, 100 kW). Run 10,000-hour durability tests, thermal cycling, EMC qualification per CISPR 25.
Year 3+
Production & Scale
Win OEM contract. DevLab becomes training platform for new hires. ProVerif handles variant development. IndustrialCell validates every production batch.
Ready to Transform Your Development Process?
Let’s discuss your specific motor control challenges and design a tailored MBD testbench solution.